Hello! I'm Ezar Sadeque, an aspiring engineer with a passion for creating innovative solutions. I'm based in Brooklyn, New York: attending The Packer Collegiate Institute.
Please feel free to see my projects below!
Education is an extremely important component of personal and community development, but unfortunately, rural areas are often limited by unreliable power.
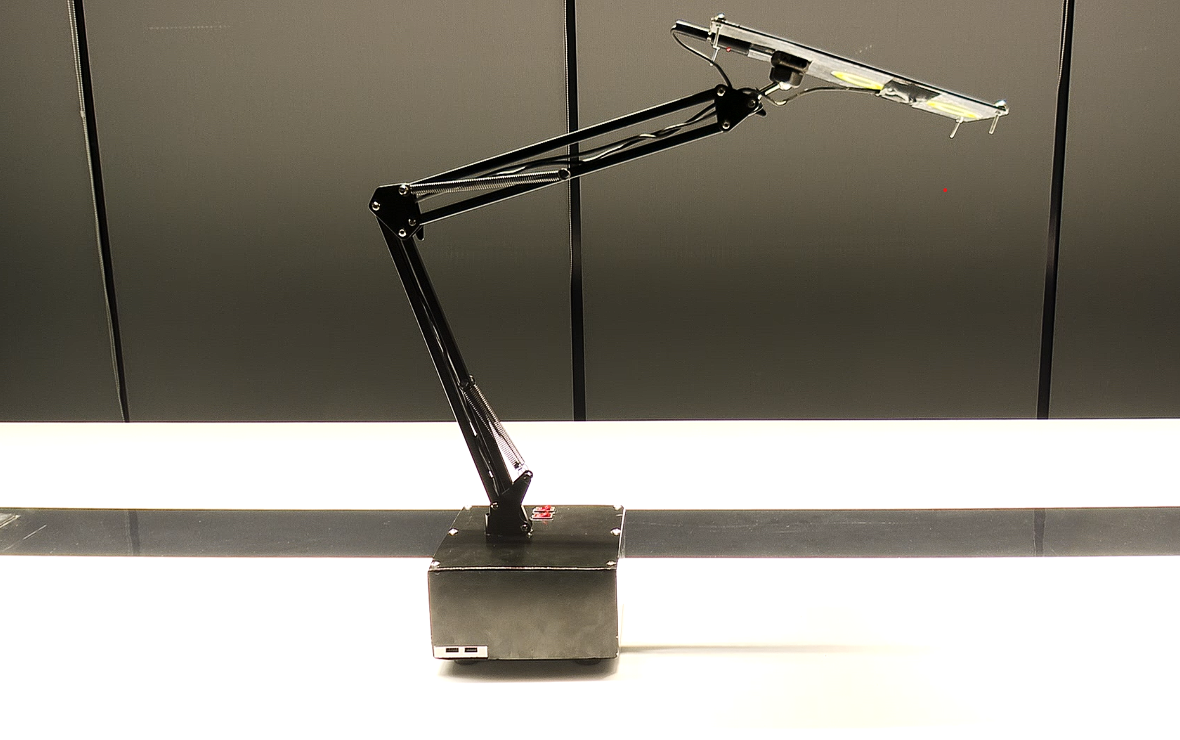
To help address this challenge, I developed a solar-powered reading light and USB charger to provide students with a dependable source of illumination for studying after dark.
Project Overview
A solar panel (8 W or 12 W) charges a Li-ion battery pack inside a rectangular base. Power
is managed by a USB controller, then boosted/regulated to drive high-output LEDs and provide
5 V USB charging on two ports. Two push buttons control the lamp heads. An articulated,
spring-loaded arm lets you aim the beam precisely over a desk.
Base & Layout
Rectangular base, plain-sheet construction (black)
Dimensions: 8″ (W) × 7″ (L) × 4″ (H)
Centered adjustable light stand
Power & Battery
Li-ion pack: 4 × 3.7 V cells (≈ 8000 mAh total)
USB power/charge controller inside base
Two 5 V USB output ports for phones/power banks
Solar & Performance
Panels: 8 W or 12 W compatible
12 W panel: 9.5″ × 12.5″, ~5.2 V, up to 1.8 A
Charge time ≈ 2 h in direct sun (typ.)
Run time (8 W panel): ~3 h (one LED) / ~1.5 h (two LEDs)
Lighting & Controls
Two high-power LEDs (10 W each)
Two on/off push buttons on the top face
Articulated spring-loaded desk arm for aiming
Design Process
Final
Parts spread: 4× Li-ion cells, USB charge/power controller, wiring harness, two LEDs,
articulated arm, enclosure hardware, solar panel and leads.
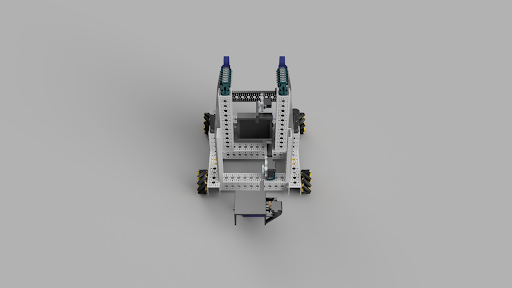
Final
Internal layout with pack, controller, dual USB ports, and serviceable wiring.
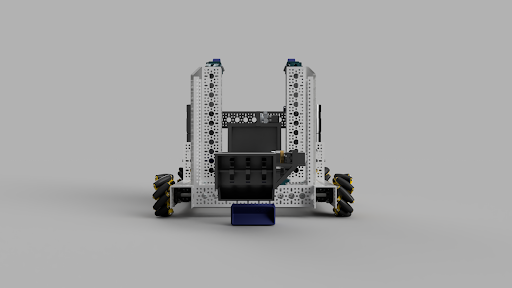
Final
Front view: articulated arm and dual lamp heads with diffuser.
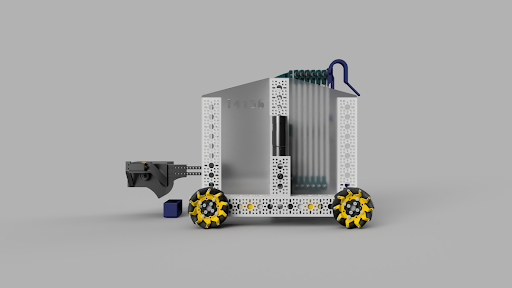
Final
Side view: two push-button switches on top and ventilation along the base.
Final
Powered on — stable, even illumination for reading.
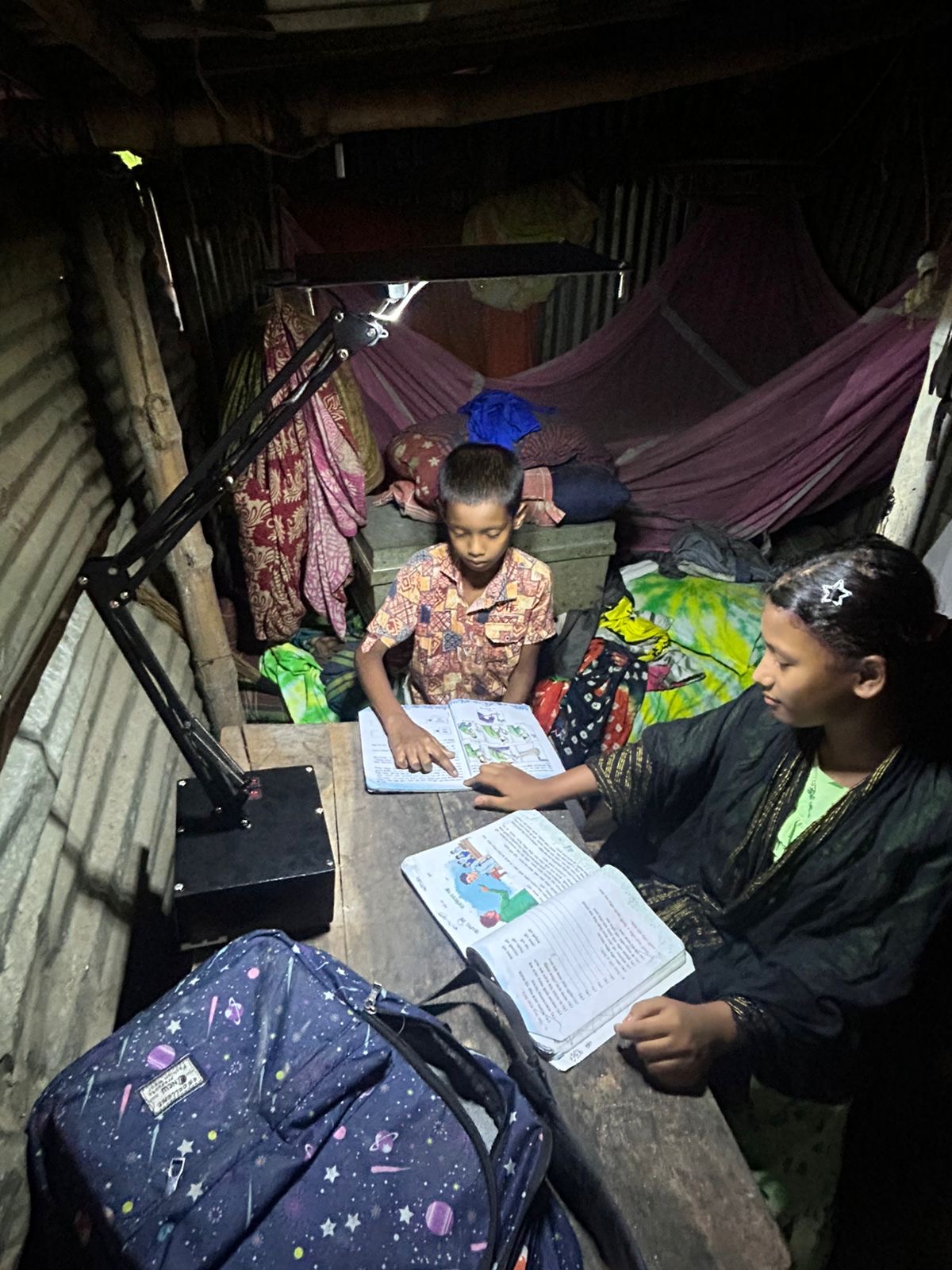
Impact
Shanaj (11) and Topon (9) studying together
Shanaj reading in bed with focused, glare-free light
With two hours in the sun, the solar lamp offers 3 hours with a single LED on and 1.5 hours when both LED lights are activated. Currently has been distrbuted to two siblings, and in the works of finding investors to manufactor more lamps for rural schools in Valuka, Bangladesh.
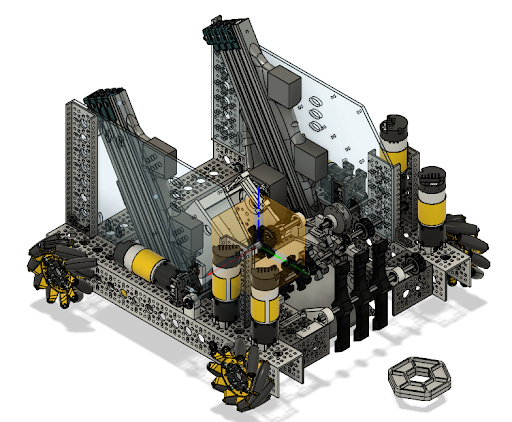
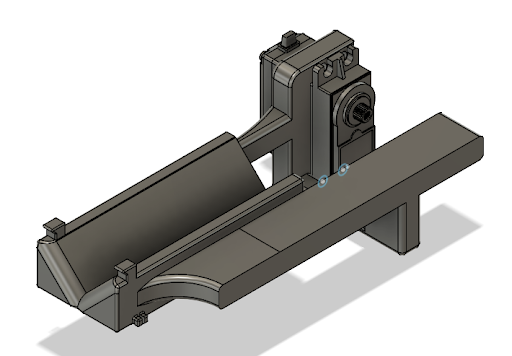
For the 2024–25 season, 2024 FTC's "Into The Deep" game challenged robots to collect and score
small "pixels" into high baskets and ascend a central structure. As lead designer for Team 14156,
I developed a mecanum-drive robot with a vertical roller intake, bucket outtake, and dual linear slides
to reach the high basket and climb the structure. The design focused on repeatable scoring cycles and
reliable endgame ascent.
Design process
Chassis
We chose a square goBILDA frame for packaging and serviceability, then modified members
for slide clearance and an auxiliary motor mount for the collection linkage.
Square chassis + 4 mecanum wheels for strafing and precise alignment to the basket.
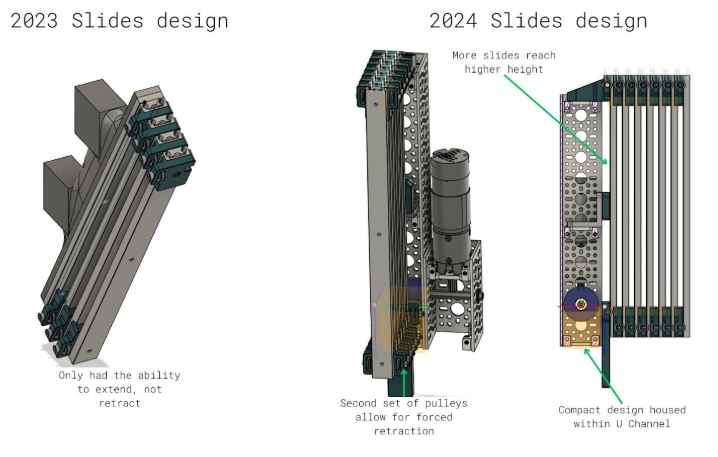
Linear slides
Two independent slide motors raise a cross-hopper. Early on, uneven rise skewed the hopper and
changed the outtake angle. I planned encoder-sync and strengthened mounts where space allowed.
Dual slides with cross-hopper; alignment is critical for consistent dumps.
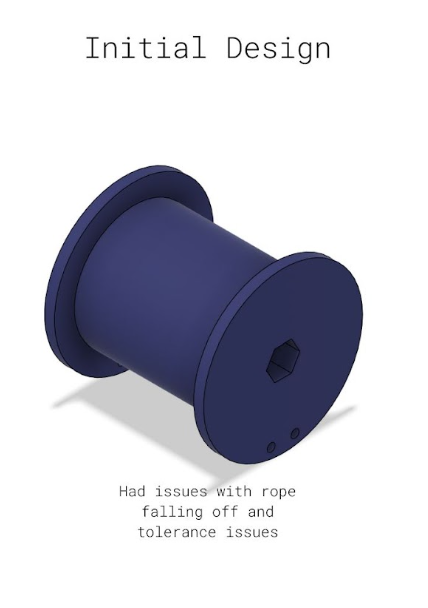
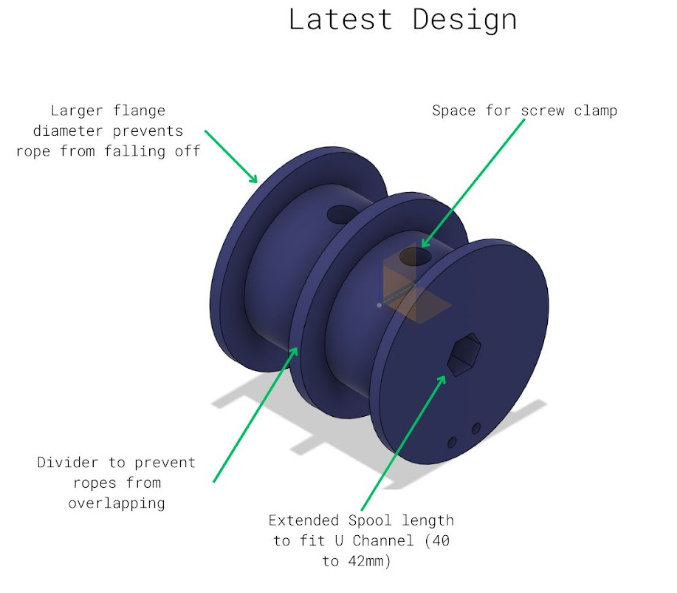
Spools
Initial issue: Narrow spools let the string wander and slip onto the axle. Update: Widened the spool and added a center rim to split up/down runs and prevent crossovers.
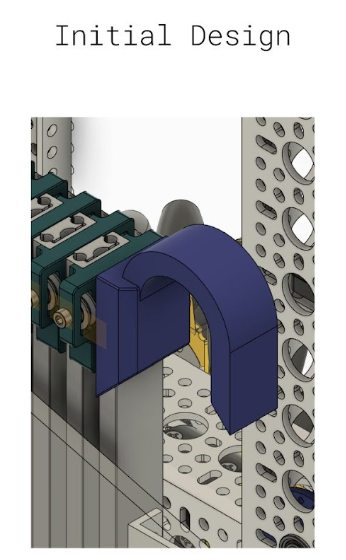
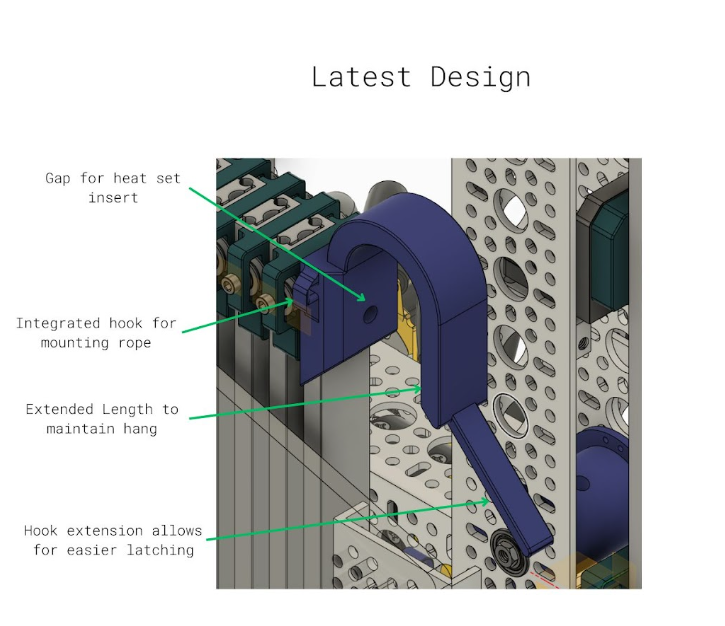
Hooks (ascent)
I slanted the hook geometry to increase tolerance during lining up to the rung.
The profile reduces “perfect hit” requirements and speeds driver handoff into the climb.
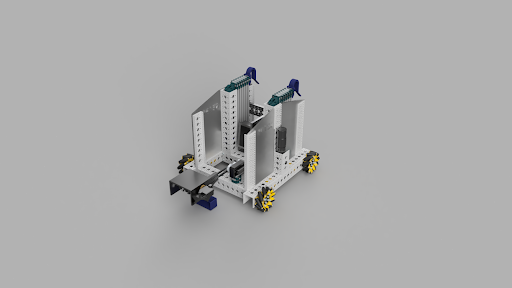
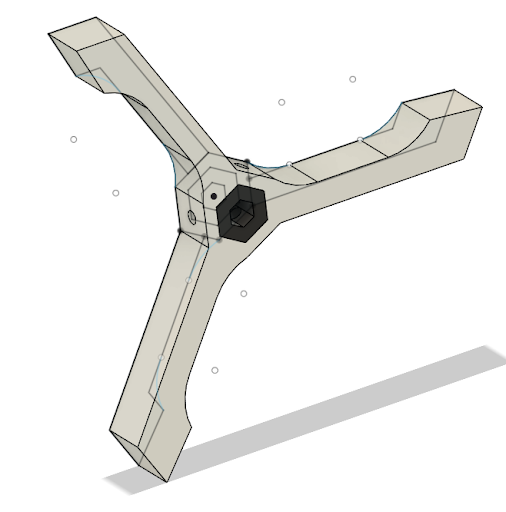
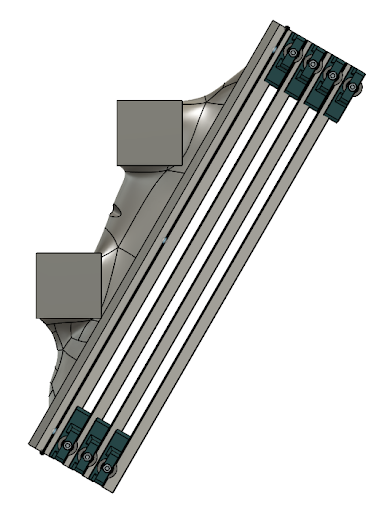
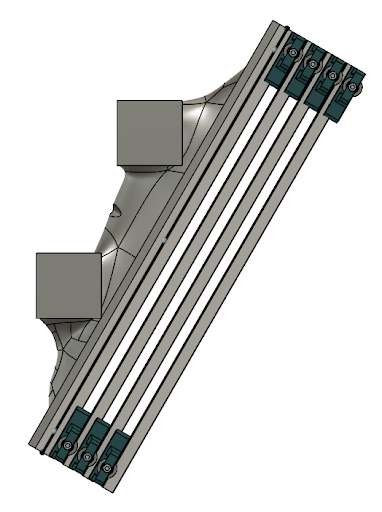
Final 3D designs (key assemblies)
What I learned
Syncing dual actuators (even just with sensors + guard rails) prevents cascading skew issues.
Designing for the game meta (high basket + high ascent) focuses effort where points matter.
FTC Team 14156 — Season Portfolio Highlights
Rectangular mecanum chassis + intake → outtake → linear slides
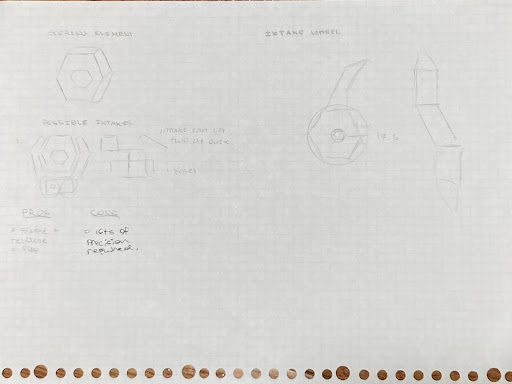
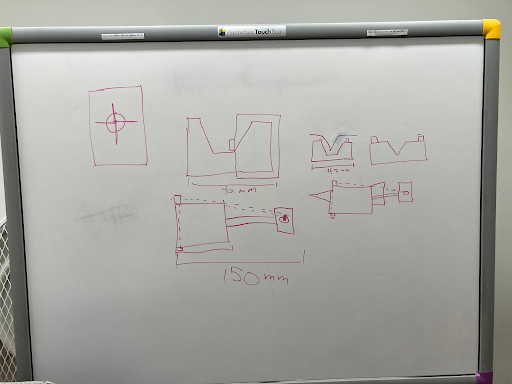
Why this project
As Team 14156 scaled up from a finalist-alliance season to Super-Qualifiers, we rebuilt our process:
plan earlier, CAD end-to-end, and design for repeatable scoring. The portfolio captures that shift:
from whiteboard sketches to Fusion 360 assemblies, 3D-printed parts, and a drivetrain + manipulator
package tuned for consistent cycles and endgame execution.
Intake
After evaluating a claw concept, the team adopted a vertical roller intake with custom flexible flaps—stiffer than
surgical tubing for better force transfer. Iterated from two-end to three-end flap geometry.
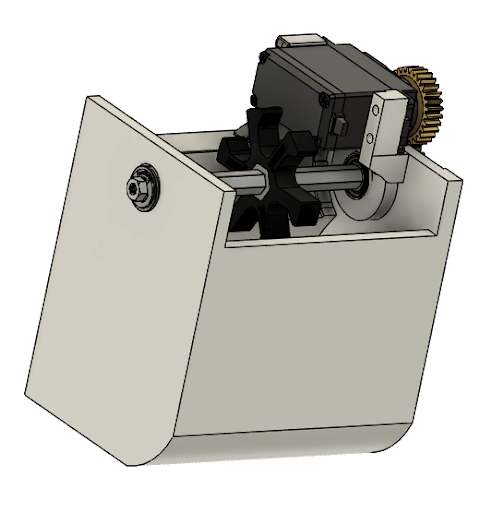
Outtake
Simple, reliable bucket outtake with a small roller to transfer pixels from the ramp into the bucket—then a quick flip
to score on the backdrop. Roller isn’t strictly required but boosts consistency.
Bucket + helper roller for controlled handoff and clean dumps. (placeholder image)
Linear Slides
Switched from prior REV slides to Misumi linear rails for speed and weight savings; upgraded to durable
Kevlar string to prevent fray. Ensured mounts were stiff and motion smooth across travel.
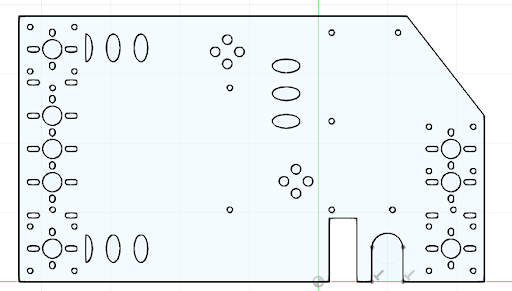
Side Plates
CNC-cut polycarbonate side plates provide rigid mounting for slides and electronics (REV Hubs),
solving last year’s packaging pain points.
Drone Launcher
Onboard endgame launcher: rubber-band energy, servo release, whiteboard → CAD → 3D-print pipeline.
Smooth on-ramp for skill-building and collaboration.
Build Process & Materials
CAD-first: Full Fusion 360 robot model; more up-front reviews to reduce rushed late-build time.
3D-printing choices: Polycarbonate for load-bearing parts; PETG/ASA for non-critical; Filaflex (82A) for flexible intake flaps.
Programming Stack
Android Studio + GitHub for collaborative dev and version control.
Road Runner for autonomous pathing + localization; Dashboard for real-time telemetry.
Computer Vision: Built on the FTC SDK opmode and adapted for team needs.
Season Takeaways
Advanced to Super-Qualifiers
End-to-end CAD pipeline
Faster, lighter slides
More reliable cycles
Front-load planning & CAD to avoid build crunch.
Design transfer paths to keep game pieces controlled end-to-end.
Choose materials by role: polycarb for structure, flexible filaments for intake compliance.
Use shared tools (GitHub, Dashboard) to speed debug and driver iteration.
Radiator bank drawing — finned heat exchanger for ONAN cooling
Why this project
At Reverie Power & Automation Engineering Ltd., I produced a fabrication-ready radiator drawing for a power
transformer. The goal: convert specs into a clean, buildable layout with correct fin count, flange geometry, and
service features—so a shop can manufacture, assemble, and maintain the radiator bank with zero ambiguity.
Quick heat check
Heat per fin = 275 W
Fins per radiator = 20
Number of radiators = 8
Total fins = 20 × 8 = 160
Total dissipation = 160 × 275 = 44,000 W
Back-of-envelope capacity check to sanity-check fin count vs. cooling requirement.
What I learned
Spec → shop floor: turn client notes into unambiguous dims, weld notes, and a BOM that fabricators trust.
Cooling logic: how fin area, oil path, and air side ΔT set the radiator’s effective heat transfer.
Tolerancing & assembly: flange PCD/slots for alignment; lifting points placed for safe rigging.
Serviceability: valve/oil-cock & clearance placement so a single radiator can be isolated and swapped.
Transformer cooling—ONAN in one minute
Losses heat the oil. In ONAN (Oil-Natural/Air-Natural), hot oil rises through headers into finned radiators,
sheds heat to ambient air by natural convection, and sinks back cooler. Radiator design balances fin area,
airflow (natural here), oil velocity, and pressure drop—so the tank stays within temperature rise limits.